
概要
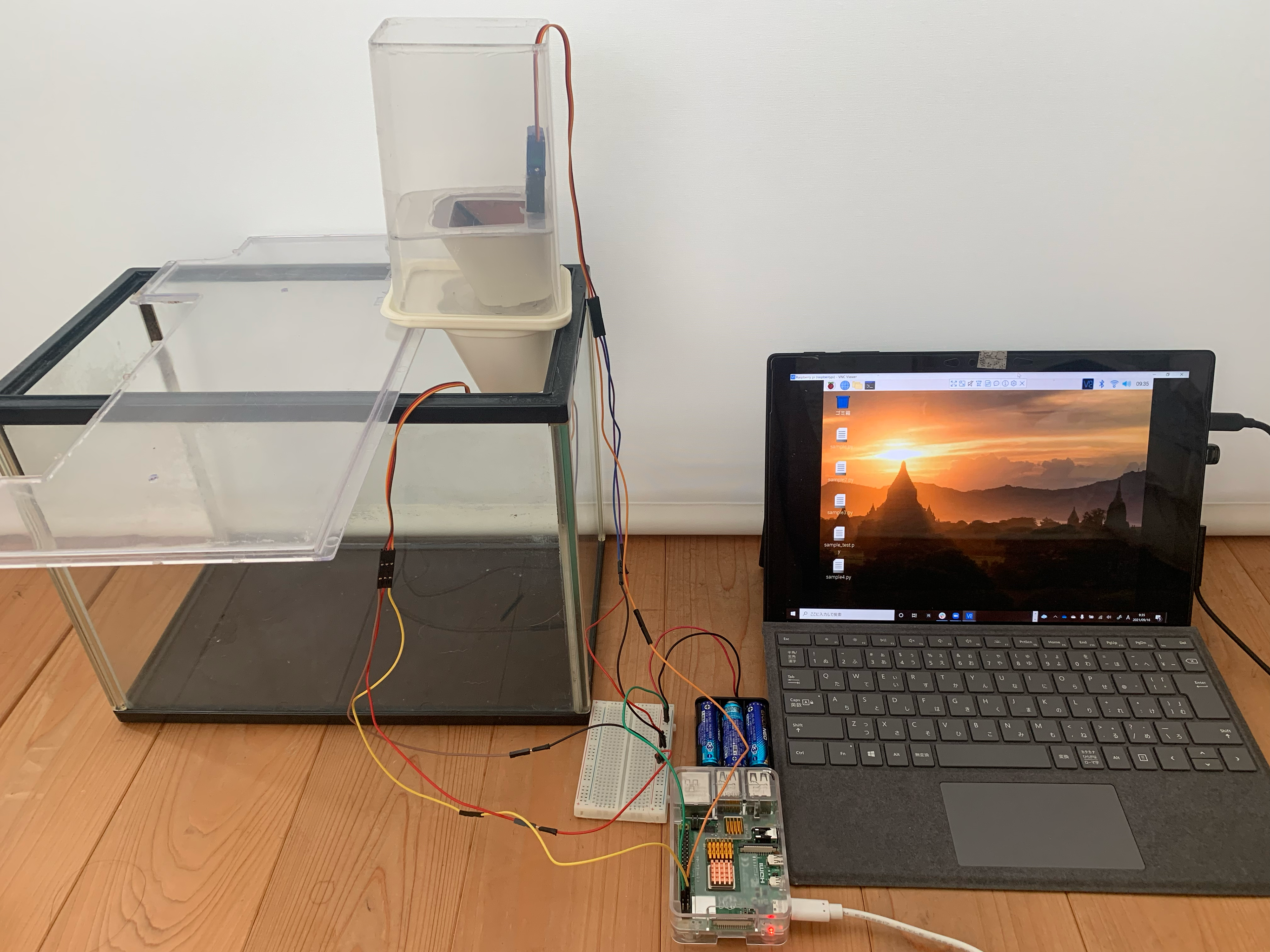
当時自宅でも飼っていたデリケートなウーパールーパーへの餌やりの手間を省く自動餌やり機を開発しました。
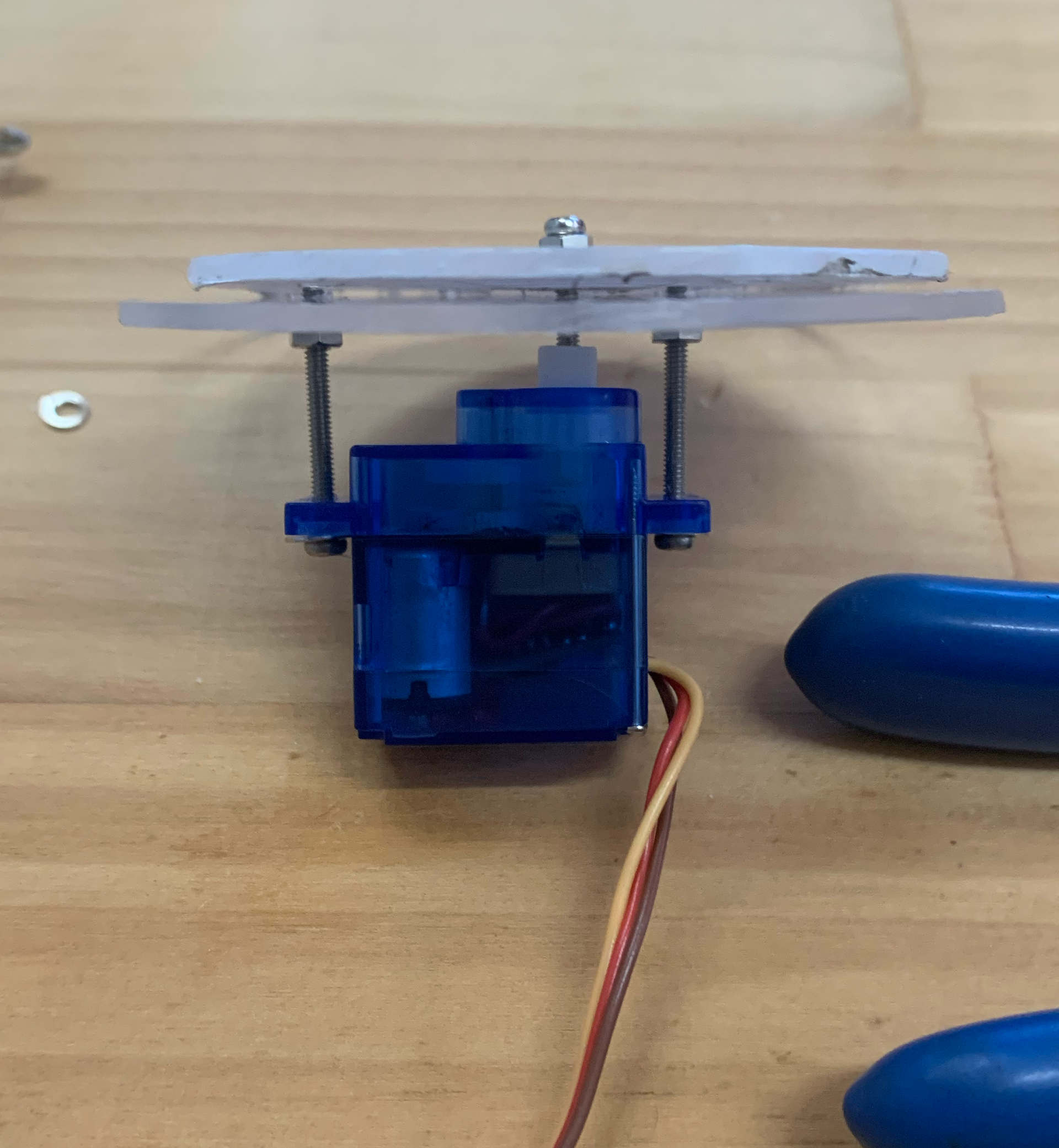
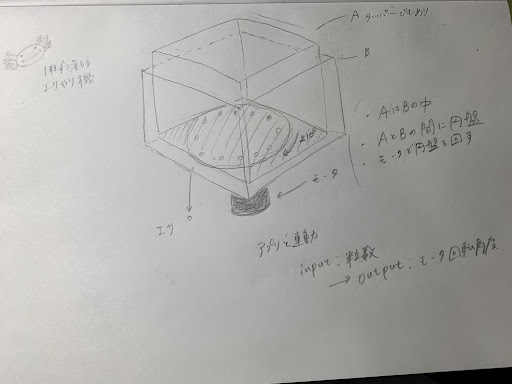
サーボモータを用いて餌が1粒ずつ落ちるような機構を考案しました。
メイキング
祖母がウーパールーパーの餌やりに困っていたので作成しました。
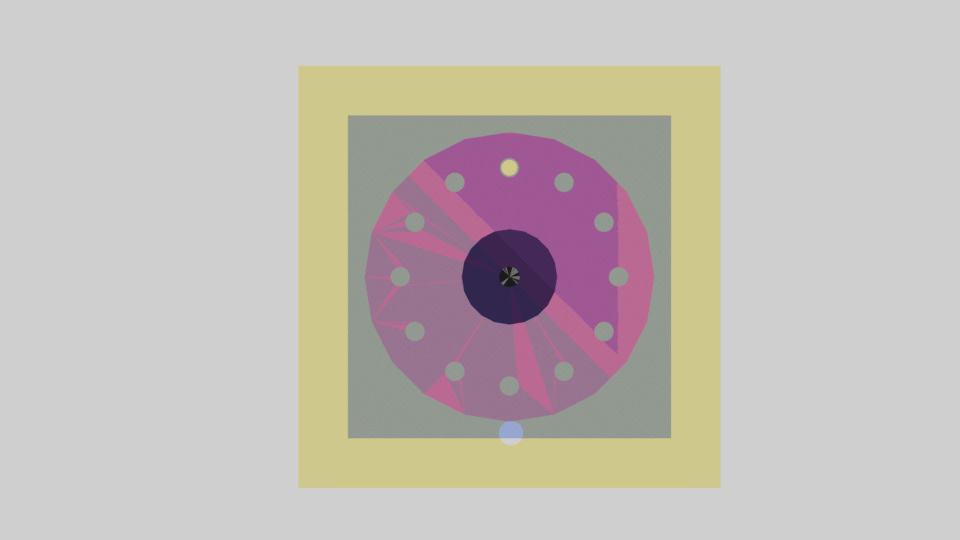
一粒ずつ落ちる機構を3Dでモデリングしてから実装。
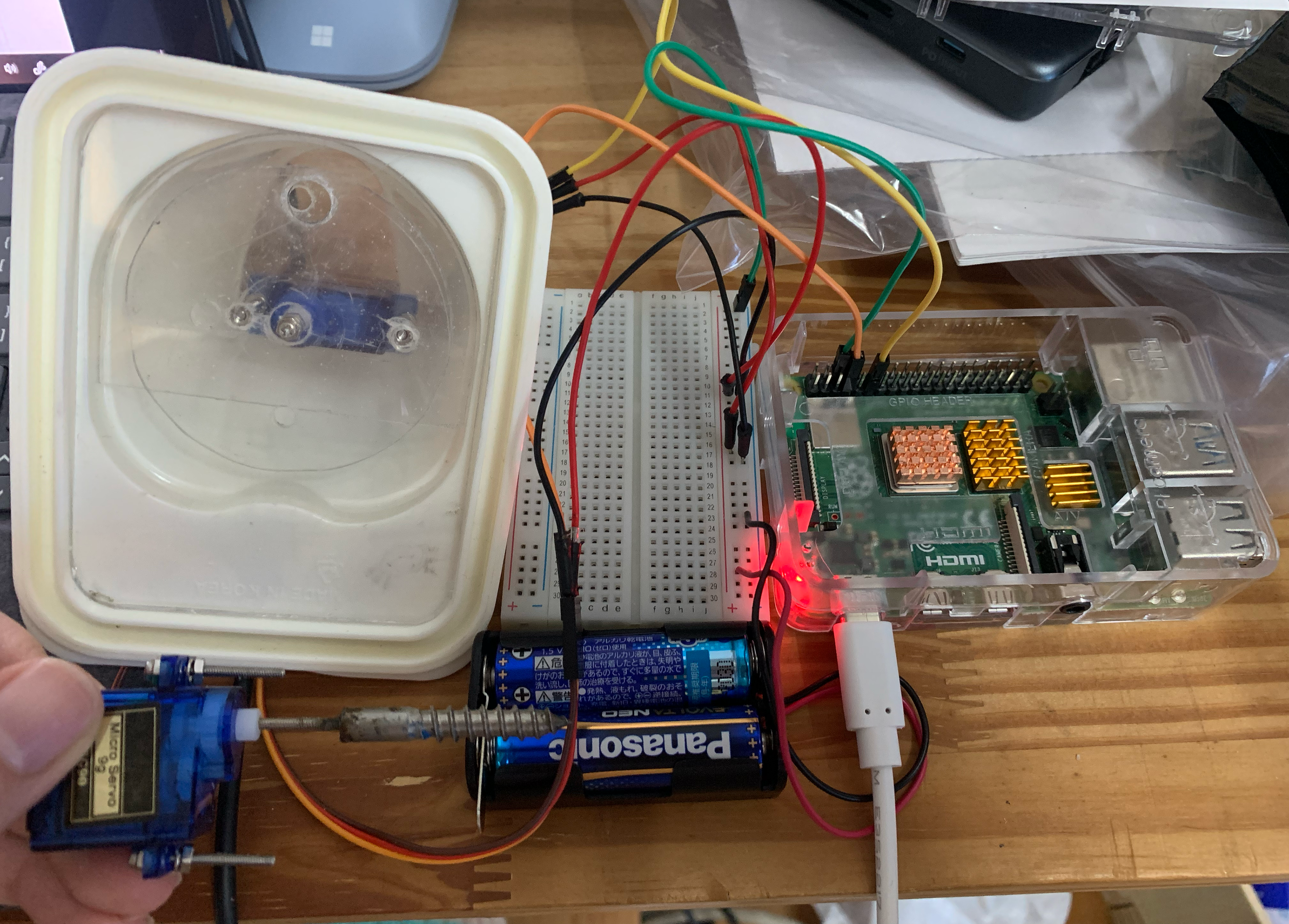
プラスチック板で作ったボール盤に穴を30度間隔で開け、サーボモーターを用いて一定間隔で回すことで1粒ずつ落ちるように設計しました。
初めてのハードウェア開発で右も左もわからない状態でしたが、何度もトライ&エラーを繰り返すことの重要性を学びました。



スキル・ツール
Raspberry Pi 4,Python
ハードウェア開発、コーディング
制作時期:2021年9月( 大学3年 )
形式:個人制作 / NAIST 研究インターンシップ